Bài đăng này cho thấy thêm bí quyết tinh chỉnh vận tốc động cơ bước với phía con quay bằng cách sử dụng board Arduino UNO với đề nghị tinh chỉnh PS2.
Bạn đang xem: Arduino điều khiển động cơ bước qua l298n
Động cơ bước được thực hiện trong ví dụ này là 28BYJ-48 (bộ động cơ bước solo cực) thường đi kèm theo cùng với board tinh chỉnh của chính nó.
Cần tinh chỉnh (Cần tinh chỉnh PS2) bao hàm nhì biến trsinh sống 10k ohm (một cho trục X với một đến trục Y) và nút ấn.
Yêu cầu phần cứng:
Board UNOĐộng cơ bước 28BYJ-48 (cùng với board tinh chỉnh ULN2003A)Cần điều khiểnNguồn năng lượng điện 5VBreadboardDây dẫnSơ đồ gia dụng
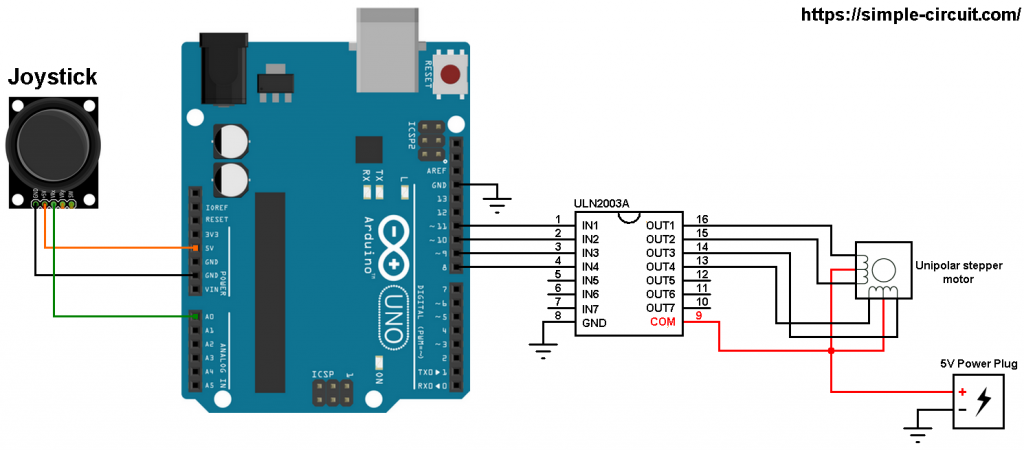
Sơ thiết bị mạch dự án được hiển thị dưới (toàn bộ những đầu nối đất được nối cùng với nhau).
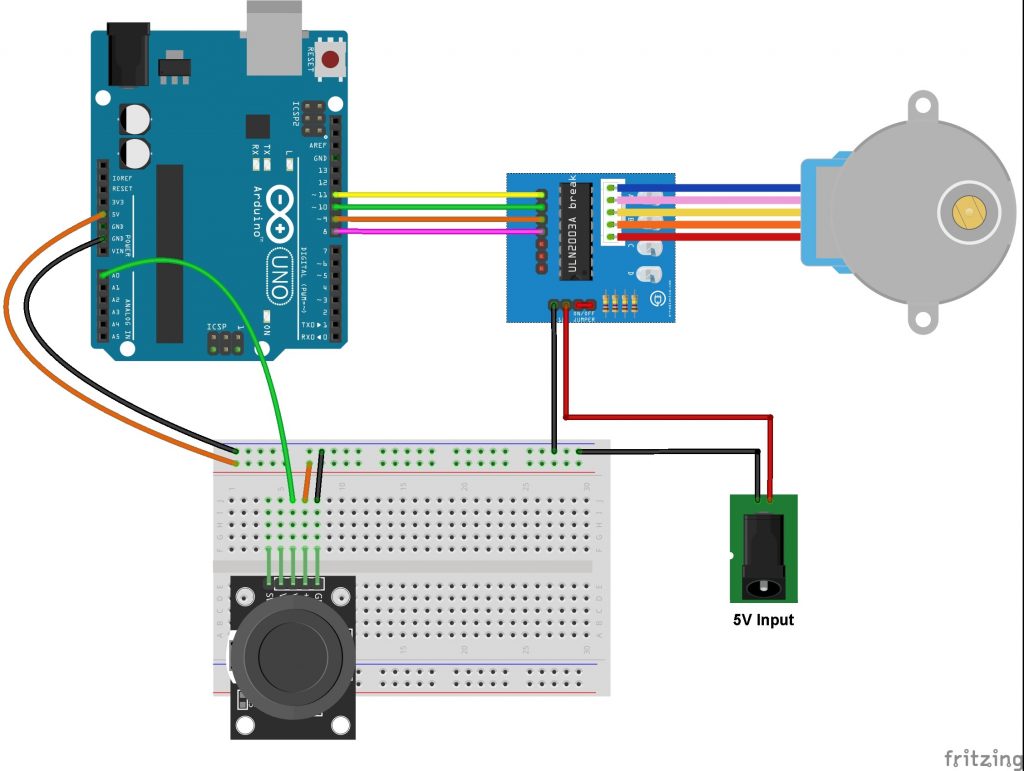
với hình hình ảnh dưới đây cho biết mạch fritzing :
Động cơ bước được kết nối với board ULN2003A được cấp mối cung cấp 5V sinh hoạt bên cạnh. Các chân điều khiển (IN1, IN2, IN3 và IN4) của board này được nối cùng với Arduino nhỏng sau:
IN1 với chân Arduino 11IN2 cho tới chân Arduino 10IN3 mang đến chân Arduino 9IN4 mang đến chân Arduino 8Board tinh chỉnh và điều khiển bao gồm 5 chân: GND, + 5V, VRX, VRY cùng SW vào đó:
GND và + 5V là những chân cấp nguồnVRX là Áp sạc ra trở nên trsinh hoạt trục XVRY là Áp sạc ra biến trngơi nghỉ trục YSW là điểm mút của nút ấn ( điểm mút ít còn lại được kết nối cùng với GND).Đầu ra của đổi thay trở trục X (VRX) được nối với chân giống như Arduino A0, đầu ra output biến hóa trở trục Y (VRY) cũng có thể được thực hiện. Chân thay đổi (SW) không được thực hiện vào ví dụ này.
Sử dụng biến đổi trsinh sống trục X cùng trục Y, bạn cũng có thể điều khiển và tinh chỉnh nhì bộ động cơ bước chủ quyền.
Điều khiển bộ động cơ bước cùng với CODE Arduino cùng đề xuất điều khiển:
Trong ví dụ này tôi sẽ sử dụng thỏng viện bộ động cơ bước Arduino (tích hợp) để dễ dàng và đơn giản hóa code, nó được cung ứng code bằng phương pháp áp dụng mẫu sau:
#include Động cơ bước nhưng mà tôi sẽ sử dụng trong dự án công trình này là 28BYJ-48, bộ động cơ này được vật dụng cỗ giảm tốc 1/64. Động cơ phía bên trong bao gồm 32 bước trên một vòng quay, Có nghĩa là trục không tính có 2048 bước bên trên một vòng xoay (64 x 32). Số bước được khẳng định trong code nlỗi dưới đây:
#define STEPS 32cùng các chân điều khiển và tinh chỉnh của động cơ bước được có mang là:
// define stepper motor control châns#define IN1 11#define IN2 10#define IN3 9#define IN4 8// initialize stepper libraryStepper stepper(STEPS, IN4, IN2, IN3, IN1);Chân đầu ra biến chuyển trsinh sống trong cần điều khiển và tinh chỉnh được nối với chân tương tự Arduino 0, được xác định trong code là:
// joystick pot output is connected khổng lồ Arduino A0#define joystick A0Lúc phím tinh chỉnh và điều khiển được sử dụng, trở nên trở ở trong phần ở trung tâm và năng lượng điện áp cổng output của chính nó xấp xỉ 2,5V, hiểu nó với Arduino sẽ mang lại quý hiếm số khoảng 511 (độ sắc nét mô-đun Arduino UNO ADC là 10-bit).
Trong code tôi đang triển khai 3 khoảng:
Cái thứ nhất trong khoảng trường đoản cú 500 đến 523: trong khoảng thời gian này, phím tinh chỉnh không được thực hiện và bộ động cơ bước không dịch chuyển 1 chút nào (tất cả Áp sạc ra rất nhiều là 0).Khoảng đồ vật nhì lúc quý hiếm số to hơn hoặc bằng 523 thì hộp động cơ dịch rời theo phía thứ nhất.Khoảng sau cuối khi cực hiếm số nhỏ rộng hoặc bởi 500 thì hộp động cơ dịch rời theo phía khác.Xem thêm: Những Cách Đuổi Ruồi Hiệu Quả Nhất, 14 Cách Xua Đuổi Ruồi Đơn Giản Hiệu Quả
Tốc độ của bộ động cơ luôn luôn ở trong vòng từ 5 mang lại 500 vòng / phút ít. Di đưa bắt buộc tinh chỉnh và điều khiển đến cả tối nhiều (cả nhì hướng) tạo nên động cơ dịch chuyển sinh hoạt tốc độ về tối nhiều.
CODE hoàn chỉnh: